Abstract
Enabling autonomous driving has been a long-standing goal, since it may increase safety, efficiency and convenience. Motion prediction and planning are key components that need to be solved to reach this goal. Although high definition (HD) maps provide important contextual information for motion prediction and planning that constrains the action space of traffic participants, most approaches are not able to fully exploit this heterogeneous information.
In this work, we enrich the existing road geometry of the popular nuScenes dataset and convert it into the open-source map framework Lanelet2. This allows easy access to the road topology and thus, enables the usage of (1) spatial semantic information, such as agents driving on intersecting roads and (2) map-generated anchor paths for target vehicles that can help to improve trajectory prediction performance. Further, we present DMAP, a simple, yet effective approach for diverse map-based anchor path generation and filtering. We show that combining our approach with ground truth velocity profile information yields high-quality motion prediction results on nuScenes (MinADE5=1.09, MissRate5,2=0.18, Offroad rate=0.00). While it is obviously unfair to compare our approach against the state-of-the-art, it shows that our HD map accurately depicts the road geometry and topology. Future approaches can leverage this by focusing on data-driven sampling of map-based anchor paths and estimating velocity profiles.
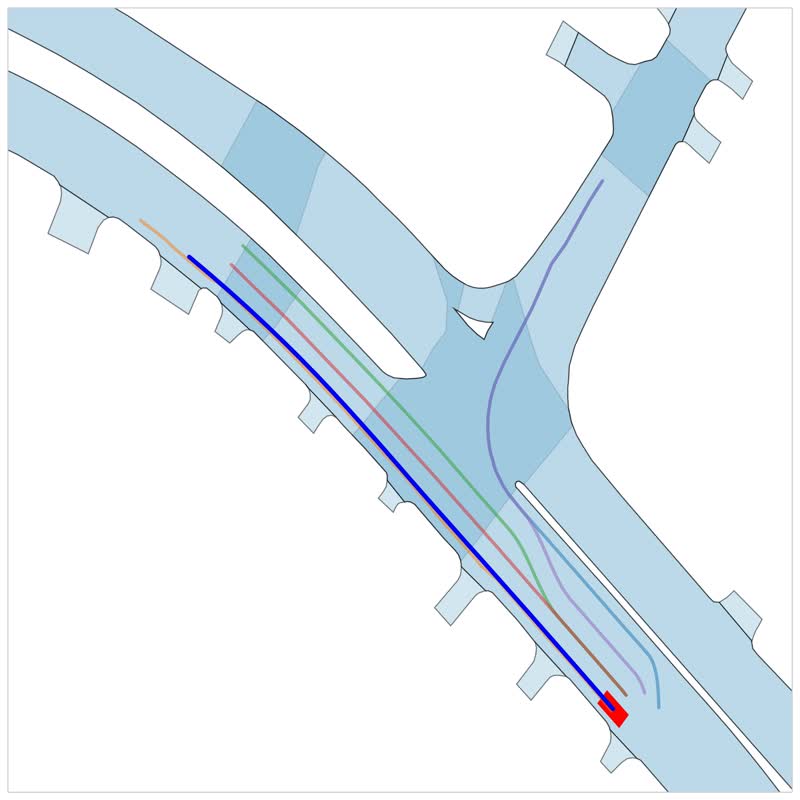
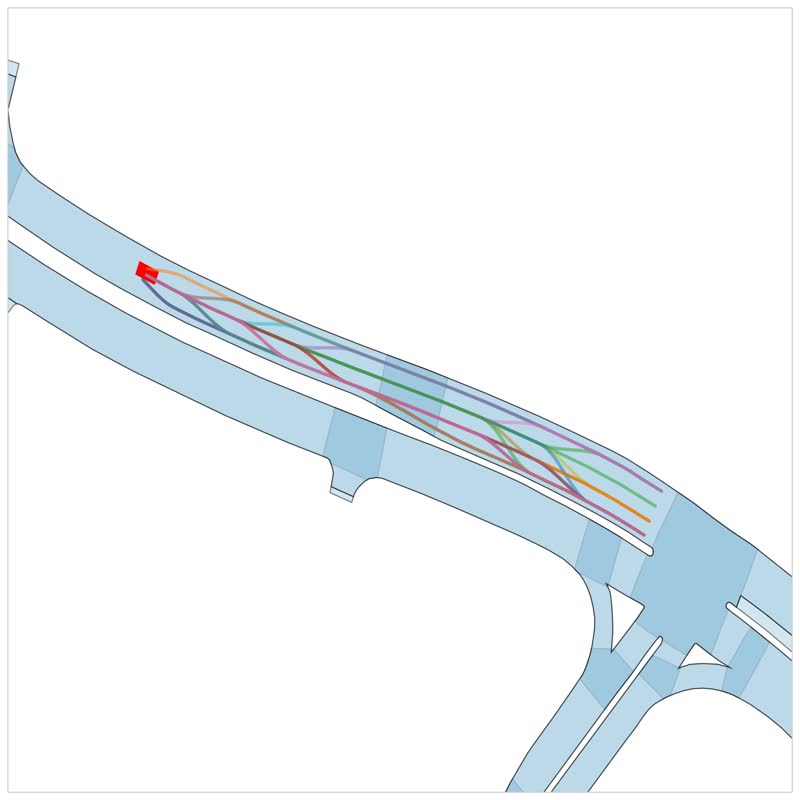
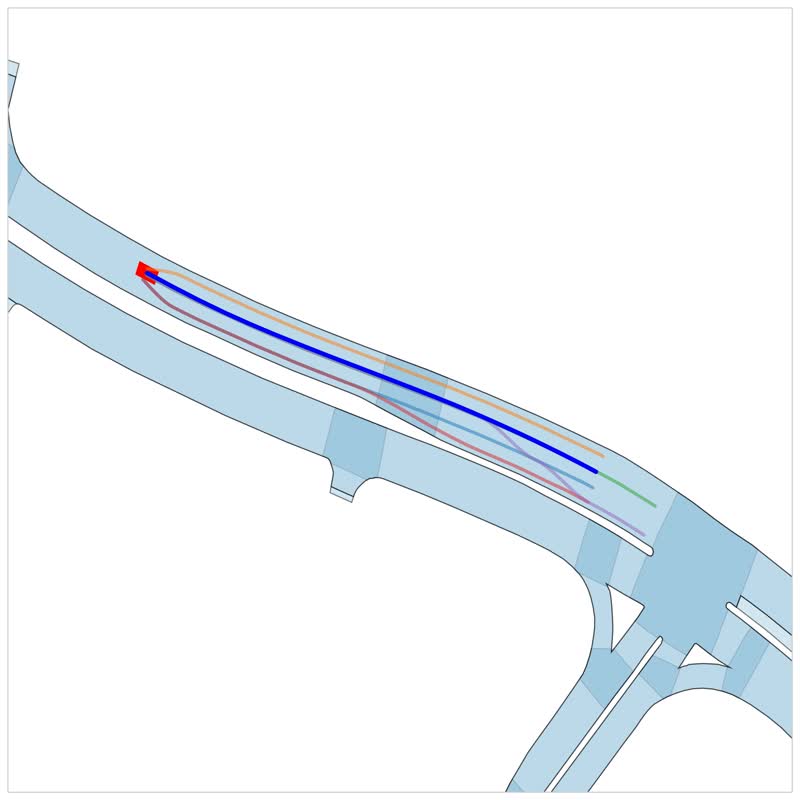
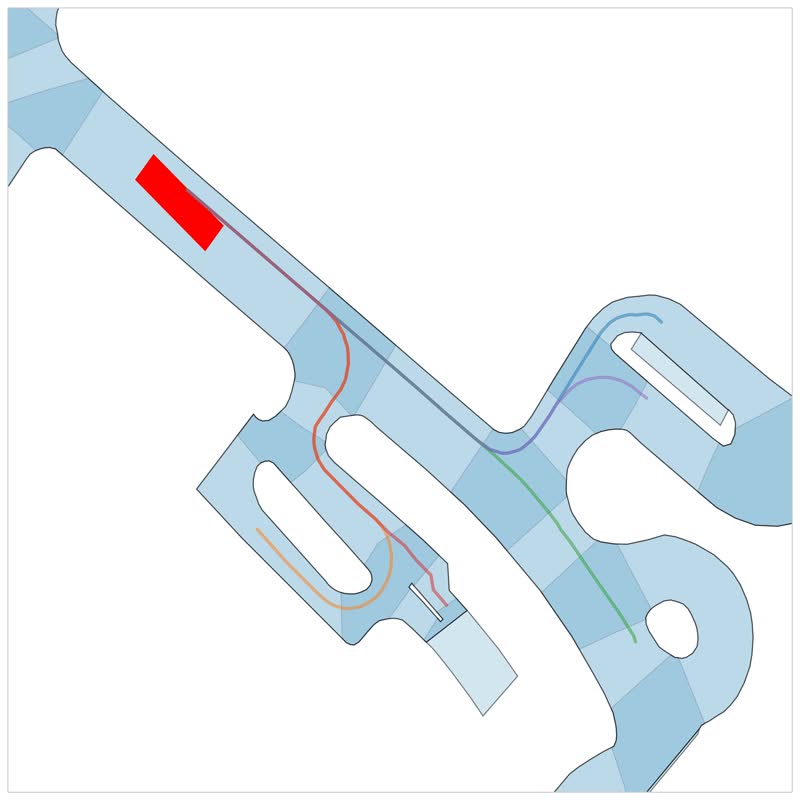
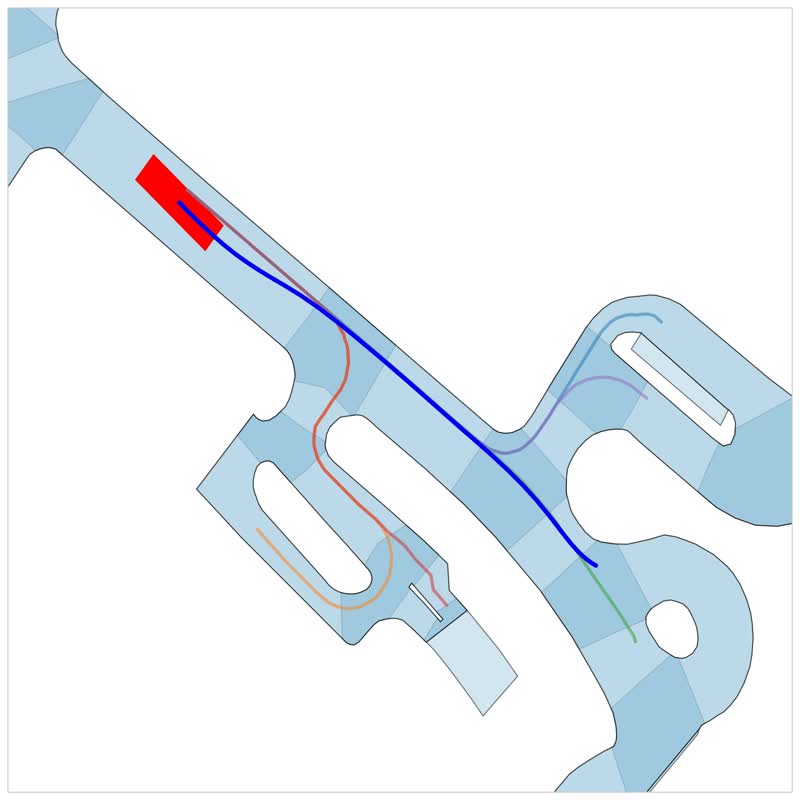
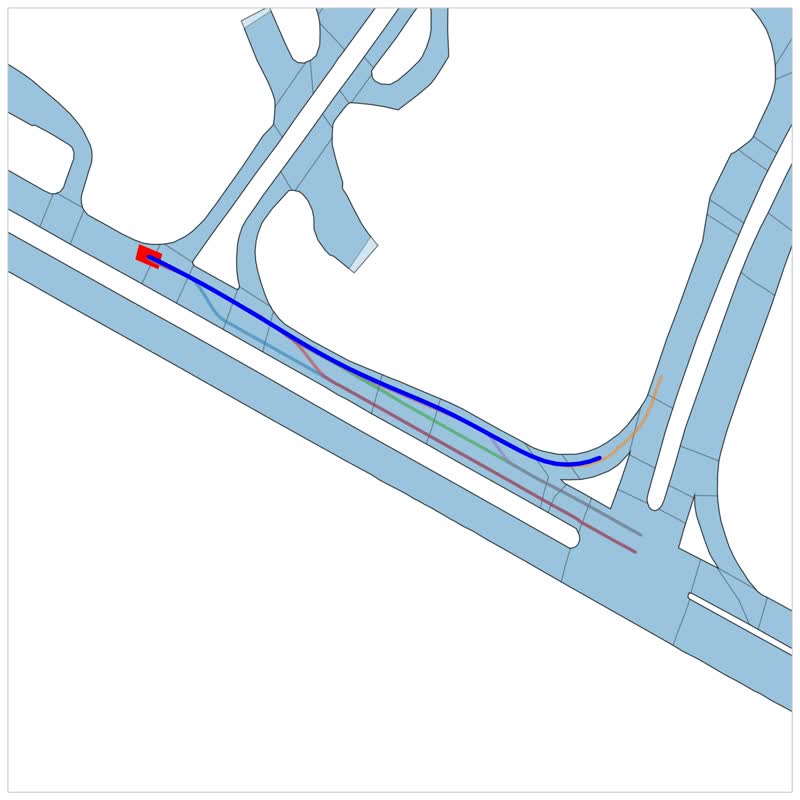
Diverse Map-based Anchor Path generation (DMAP)
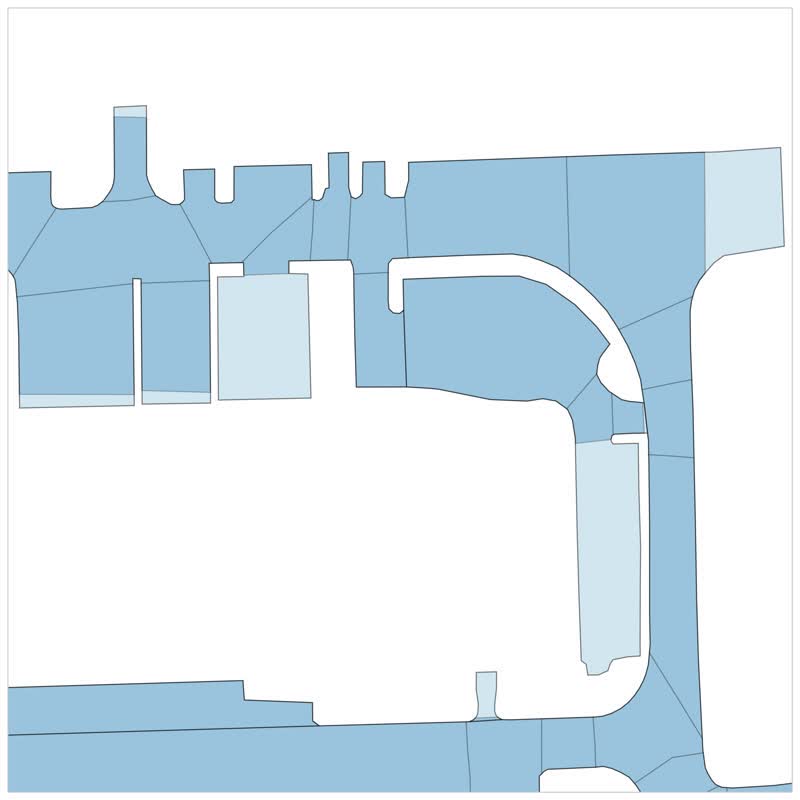
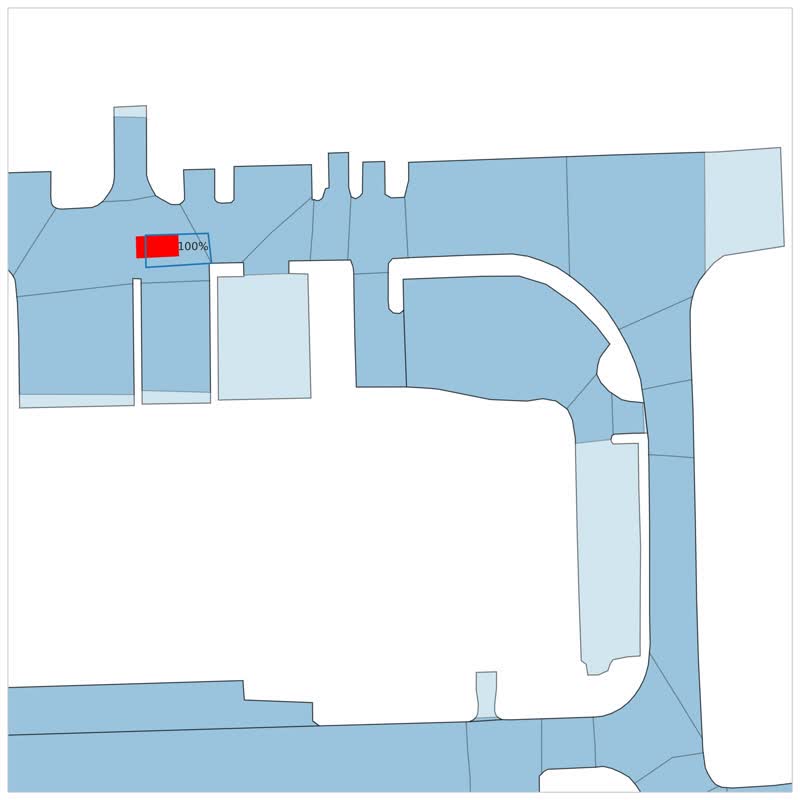
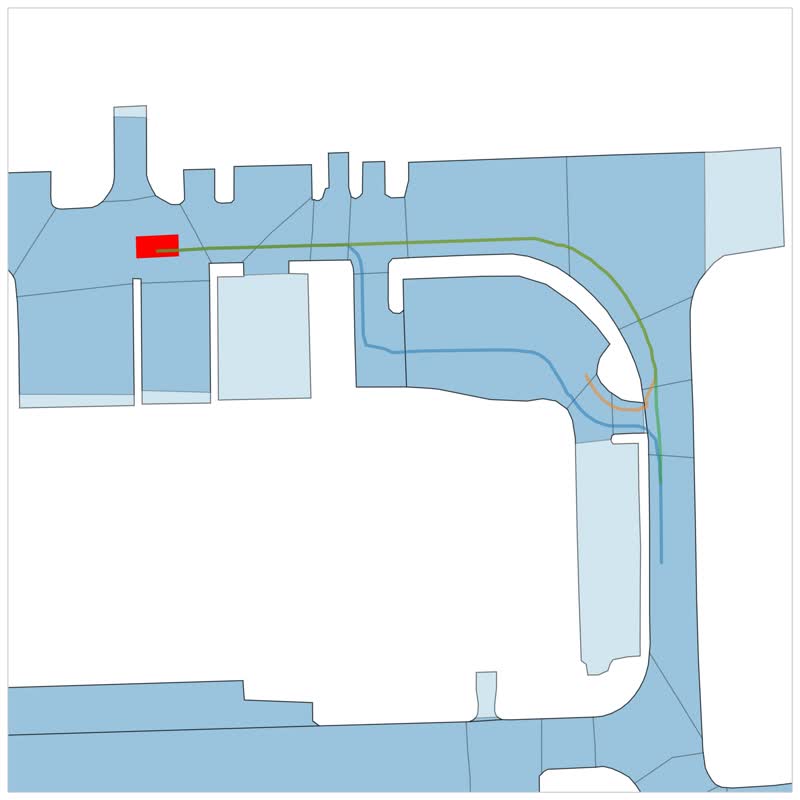
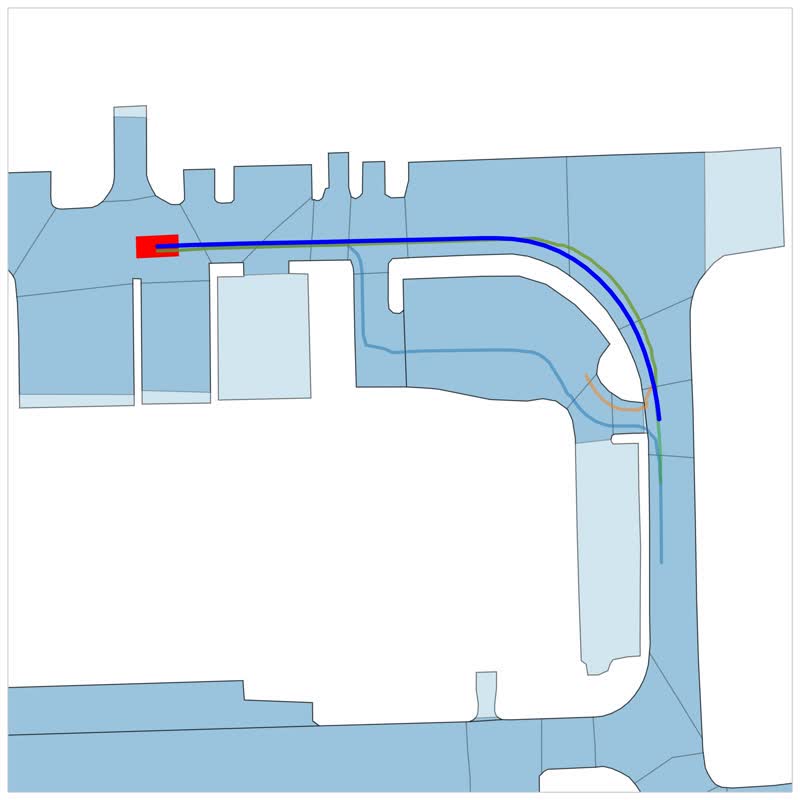
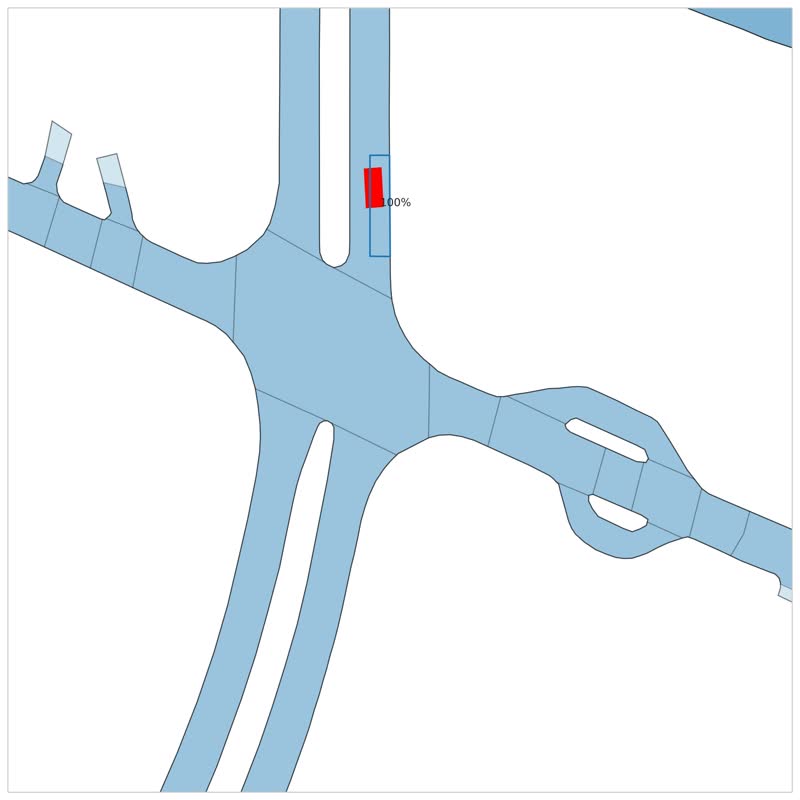
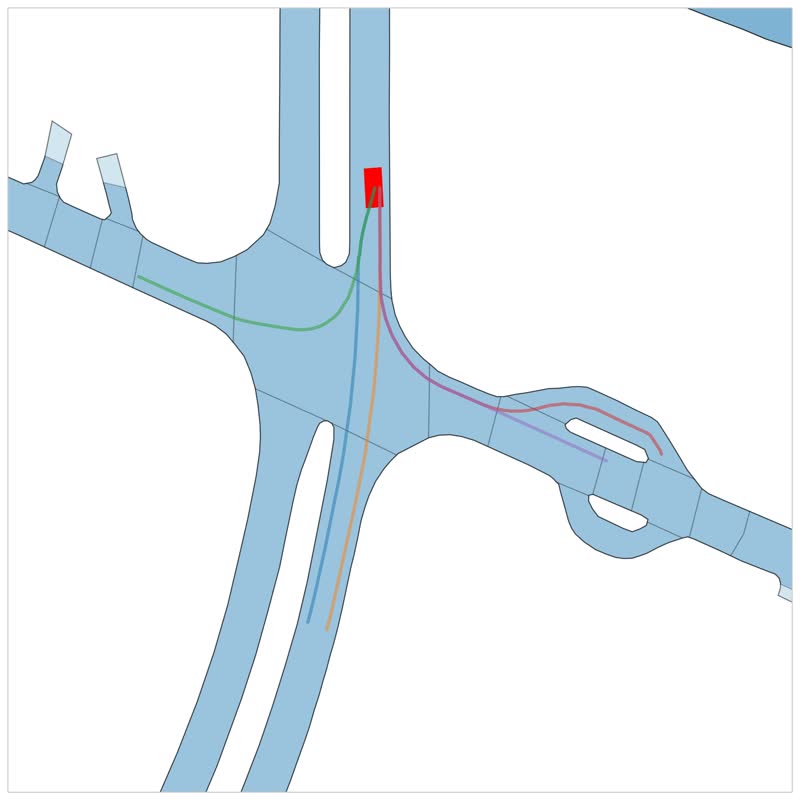
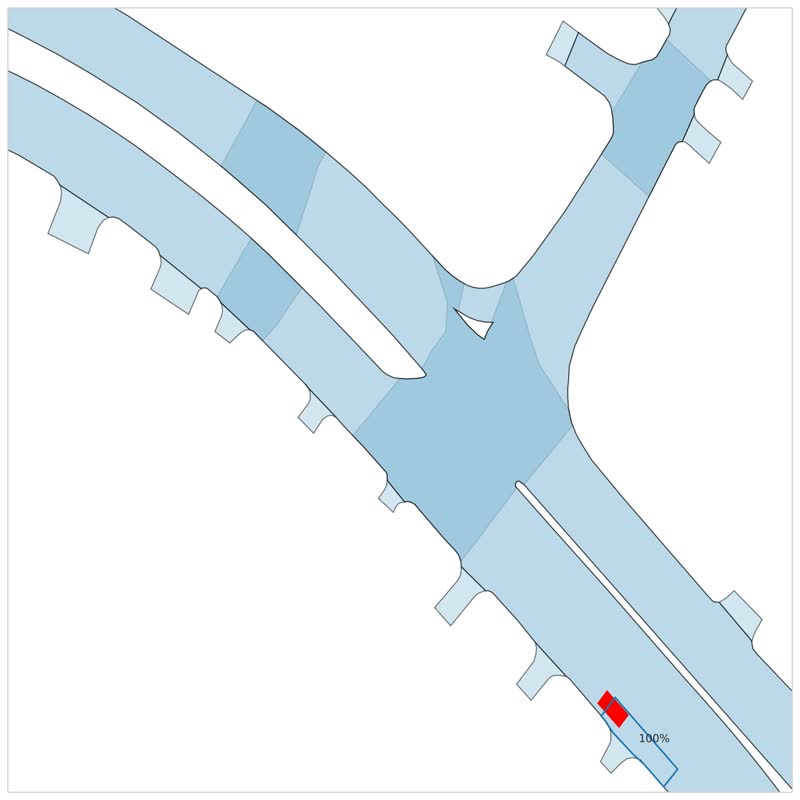
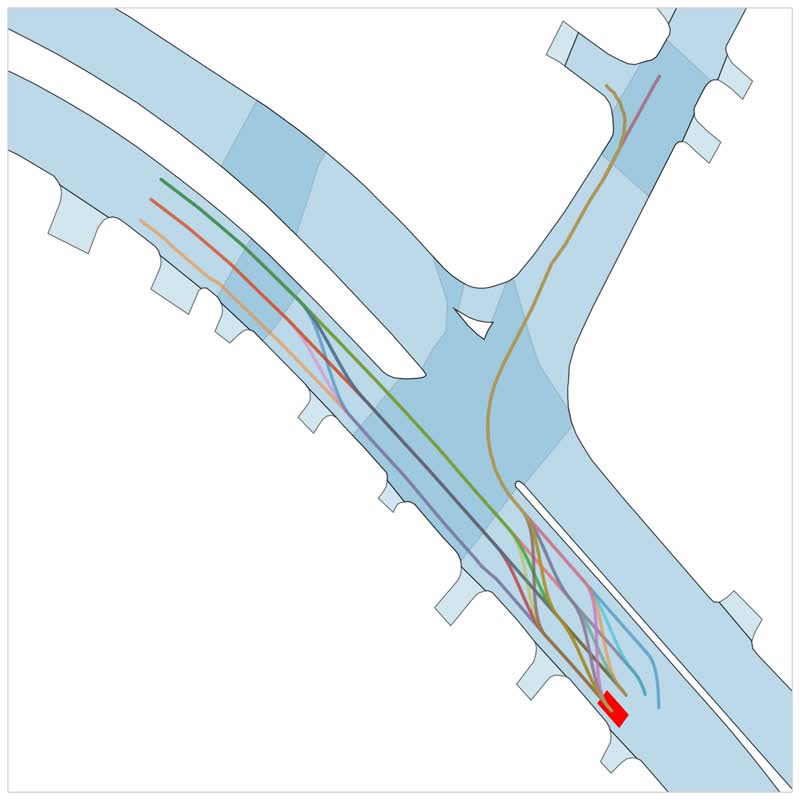
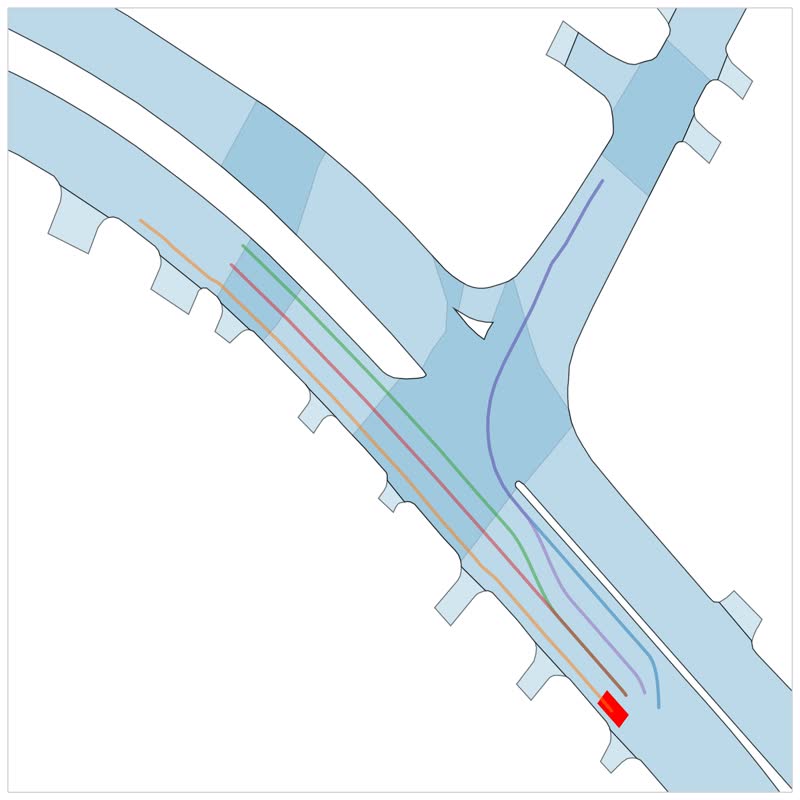
By exploiting the information of the implicitly defined lane connectivity graph of the Lanelet2 map, we present a simple, yet effective algorithm called DMAP to generate a set of diverse drivable anchor paths for a target vehicle, which can be readily used for trajectory prediction and planning tasks. We show, that when combined with the ground truth velocity profile, our map-based anchor path generation approach yields high-quality results for motion prediction on nuScenes.





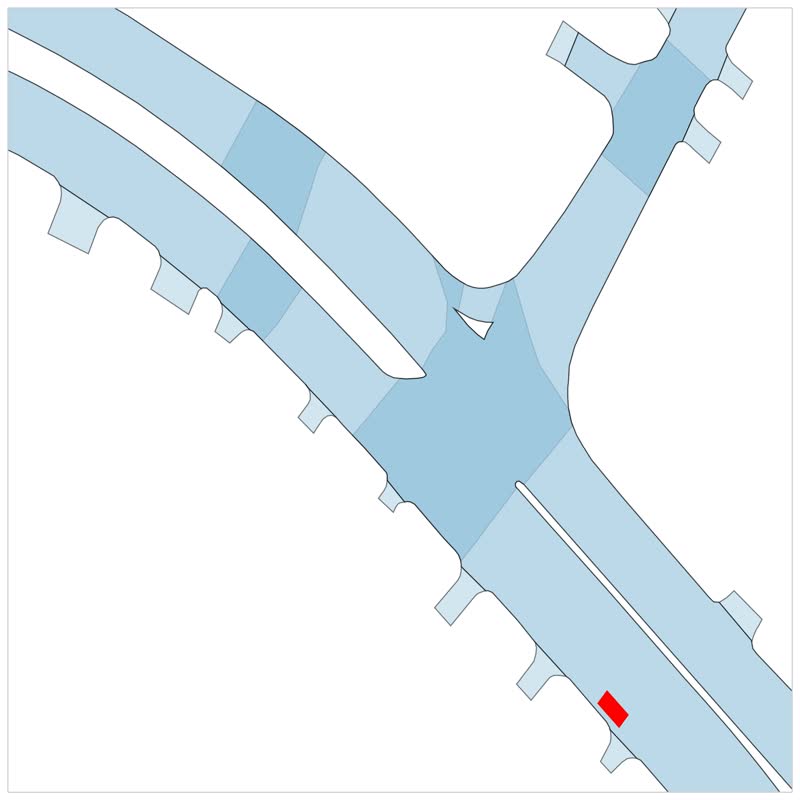




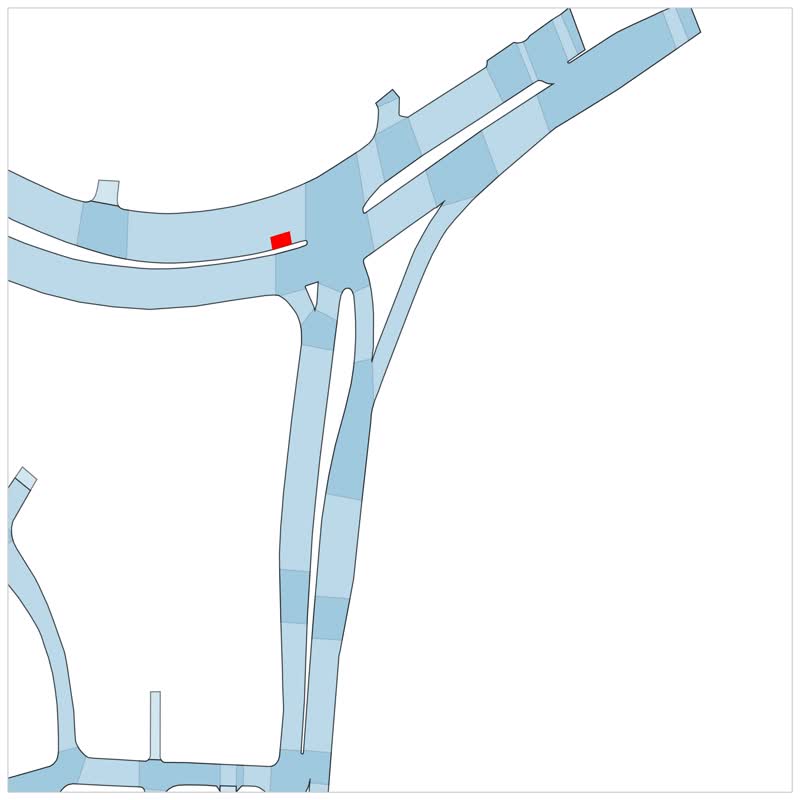





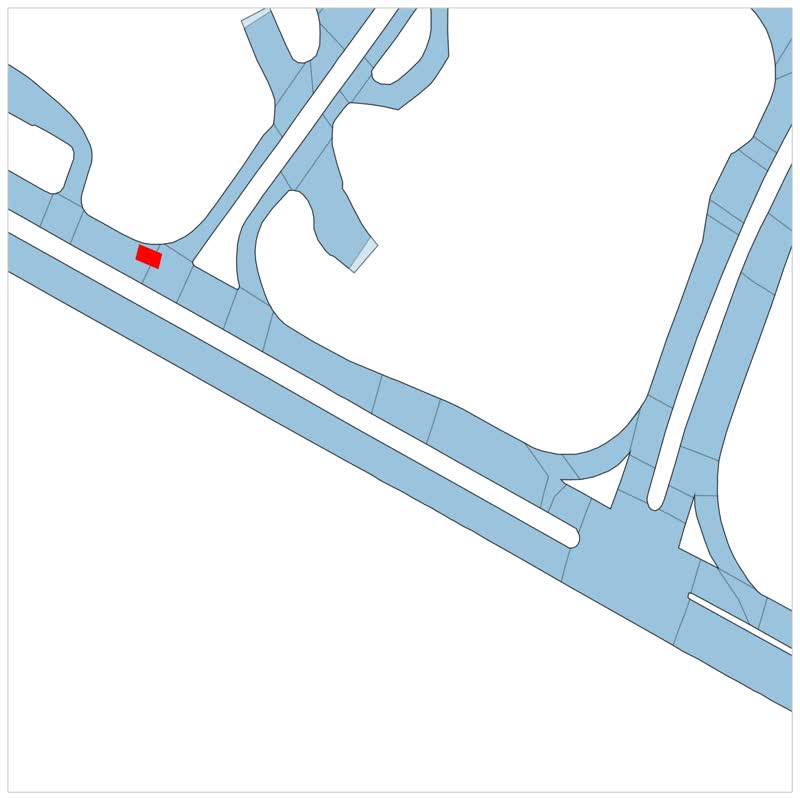



nuScenes to Lanelet2 map conversion
We present an approach to enhance the HD road maps of the popular nuScenes dataset. While the dataset already provides detailed information on the geometry of the roads and their surroundings, it is not straightforward to infer the full road topology, since intersections are not modelled explicitly. We bridge this gap by providing an approach to automatically convert the nuScenes map to the popular automated driving format Lanelet2, which enables convenient access to the full road topology.

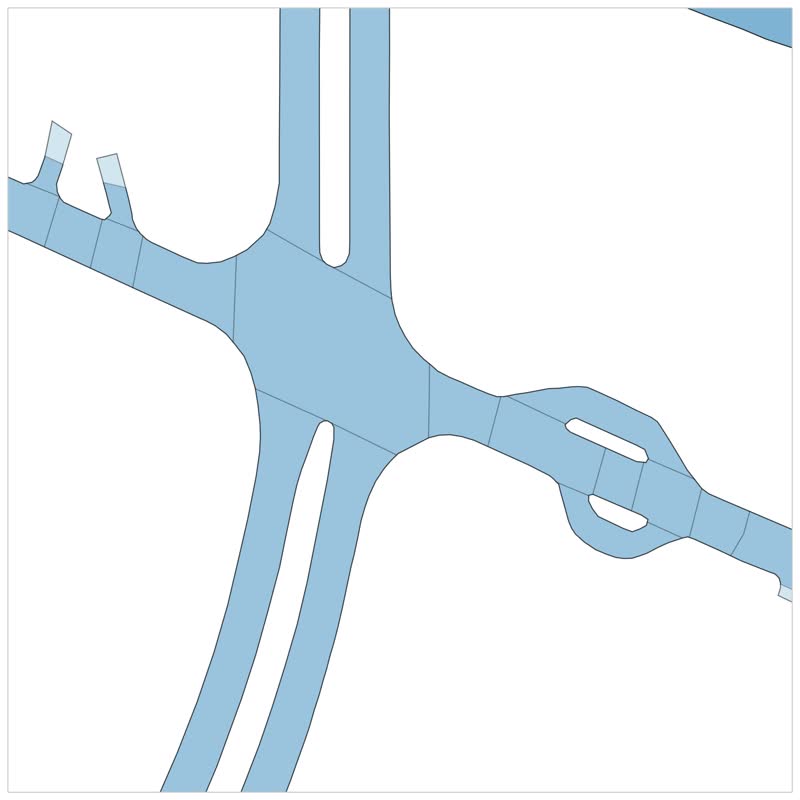
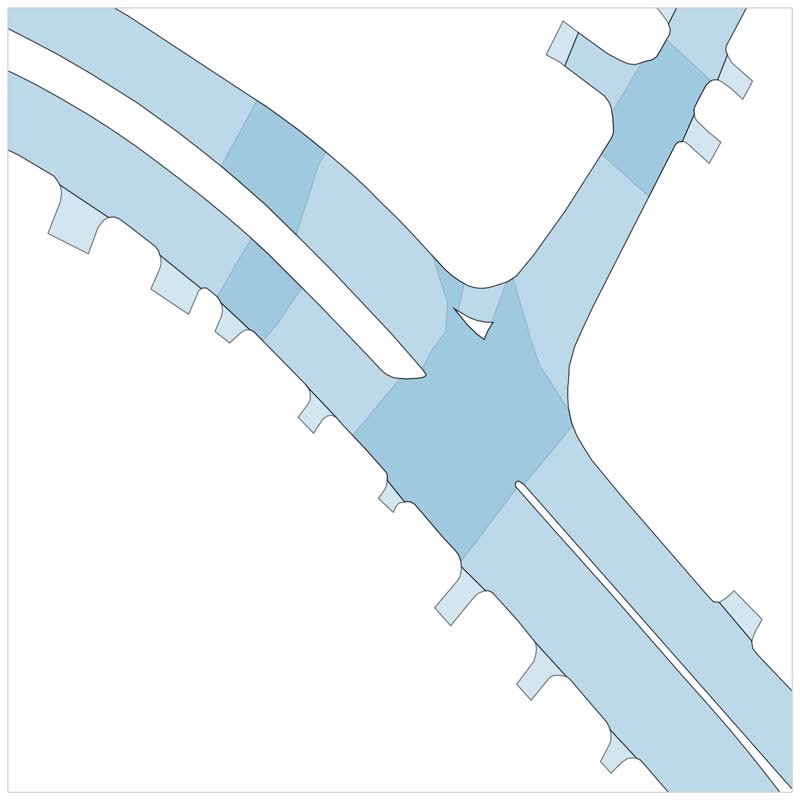
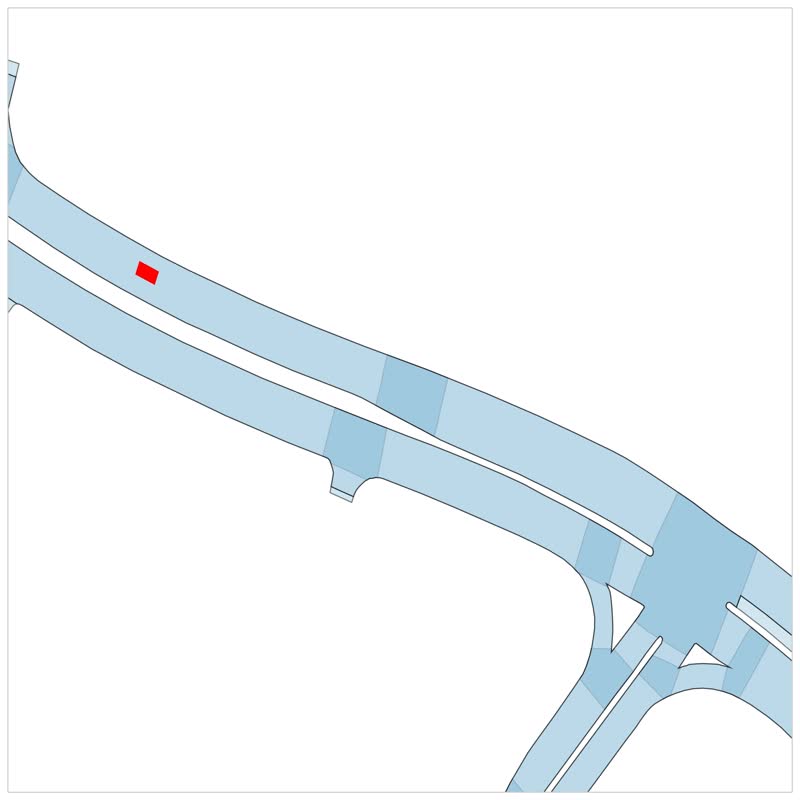
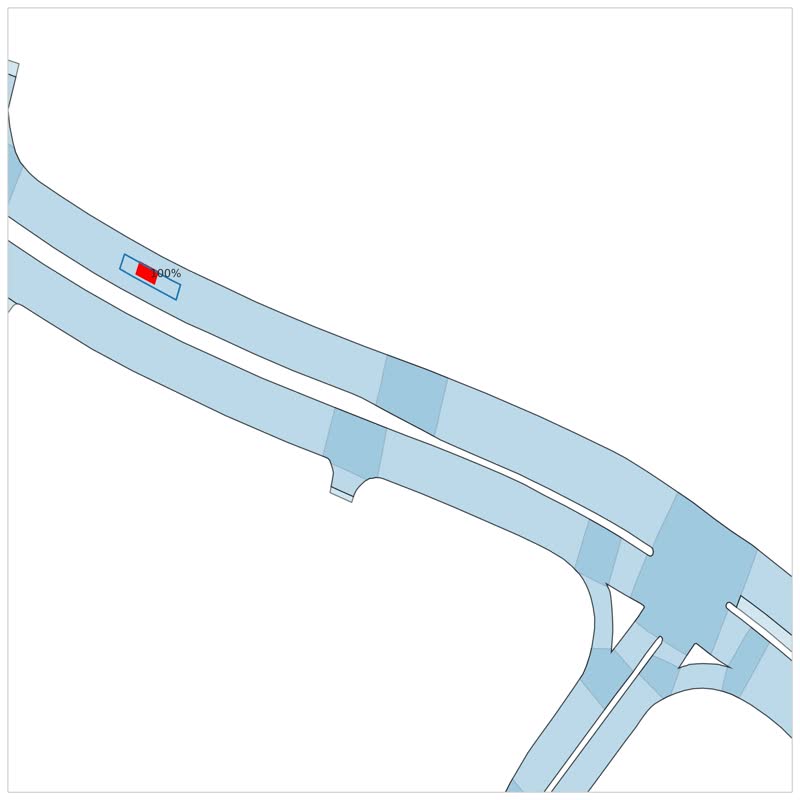
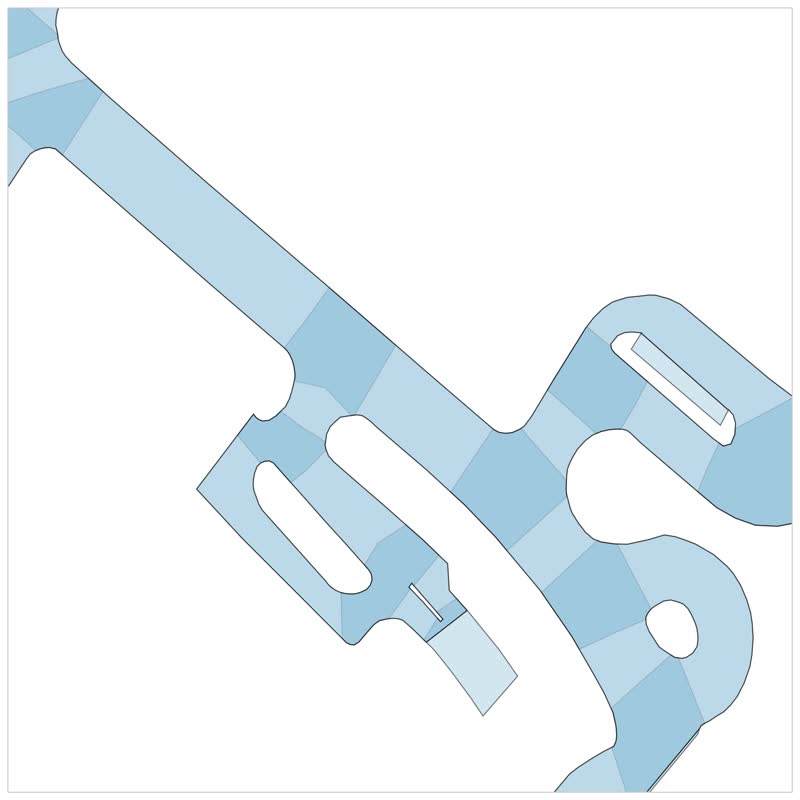
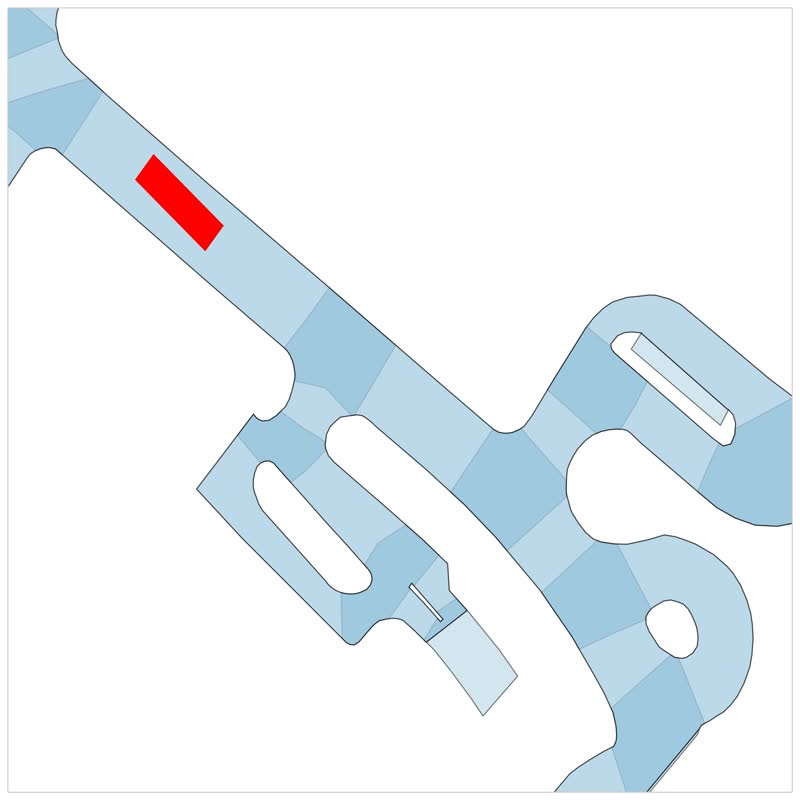
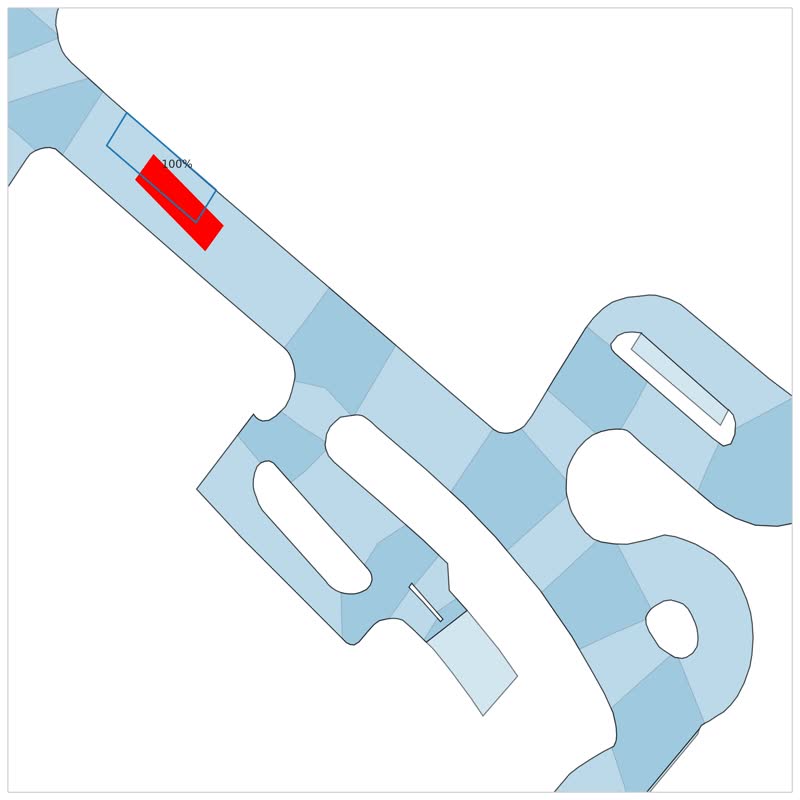
Figure: We convert the nuScenes map (a) into the
open-source map format Lanelet2 (b) to enable easy access to the
full road geometry and topology in a hierarchical structure (c).
BibTeX
@InProceedings{naumannHertleinLanelet2NuScenes,
author = {Naumann, Alexander and Hertlein, Felix and Grimm, Daniel and Zipfl, Maximilian and Thoma, Steffen and Rettinger, Achim and Halilaj, Lavdim and Luettin, Juergen and Schmid, Stefan and Caesar, Holger},
title = {Lanelet2 for nuScenes: Enabling Spatial Semantic Relationships and Diverse Map-Based Anchor Paths},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
month = {June},
year = {2023},
pages = {3247-3256}
}